What is the difference between RTK, FIX, and RTK Float?
This article gives a broader understanding about RTK, FIX and RTK Float. Real-time Kinematic (RTK) is used in digital surveying as an addition to GNSS.
Did you know everyone could survey and perform stakeouts with GPS?
Read more about the UNI-GR1, a universal RTK GNSS Receiver. Digital surveying and performing stakeouts is now easier than ever. Available in a complete package and ready to use worldwide. Want to know more? Click here
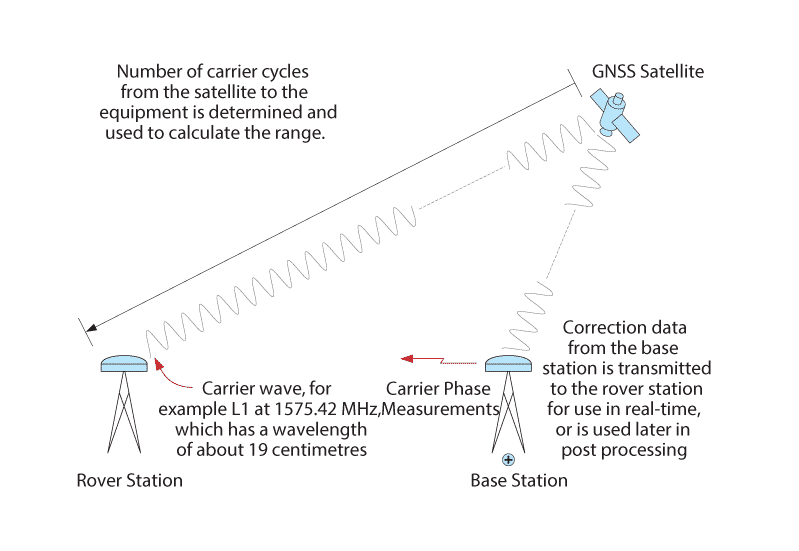
RTK (Real-time Kinematics) is based on the use of reference stations and is a collection method that is used for surveying based on GNSS. The GNSS receiver receives positioning signals from satellites and receives RTK correction data over radio or the internet. Both signals, GNSS and corrections are added into an algorithm which then calculates a positioning solution.
Depending on the number of satellites visible in the sky, you can obtain a “float” or “fixed” positioning solution with different levels of accuracy, as you can see on the dashboard in UNI-Connect. With a sufficient number of satellites visible on your dashboard in UNI-Connect, it can provide a FIX position solution with centimetre accuracy. When not enough satellites are visible, UNI-GR1 can only provide a Float solution with the best accuracy at that moment, which is not centimetre accurate. A lot of factors are taken into account to determine a “sufficient” number of satellites. You can say a minimum of 12 satellite signals equally divided over the sky and a maximum base distance of 15 km, will get you a fast and stable fix.
Fixed RTK
In short, having a FIX solution means that the UNI-GR1 receiver calculated a correct solution. It determined that the coordinates you see, have a certain accuracy with corresponding dilution. You can measure with an accuracy between 1 to 3 centimeters in regular conditions.
RTK uses complicated mathematical formulas and algorithms, including calculations of the exact number of radio wavelengths between the satellites and the reference station, to obtain a FIX solution. More details on these fundamentals can be read on the Navipedia pages of the European Space Association (ESA).
How do I get a fixed solution?
- Place the UNI-GR1 in good sky view conditions.
- Make sure the UNI-GR1 has a stable and fast (internet) connection with the RTK corrections provider.
- Make sure the UNI-GR1 is not hindered by buildings or trees.
In case you need to measure in less clear sky view areas and/or are obstructed by trees or buildings, firstly take the UNI-GR1 to a more open place until a FIX solution is obtained. Then walk slowly to the area you want to work, this helps the algorithm to maintain a stable FIX solution.
Float RTK
In a Float solution, the algorithm has not been solved (yet) and can not produce an acceptable FIX solution (yet). Since there is no FIX solution, a Float one is provided, which is always a less accurate position than a fixed solution and in general can not be used for measurements with centimetre accuracy. We suggest you wait or follow the tips above to obtain a FIX solution.
At first, the algorithm will always start in a Float status. If you have good sky conditions, you only have to wait for the algorithm to resolve, which usually takes between 30-90 seconds. In case the UNI-GR1 falls back to a Float status during measurements, it usually indicates sky conditions get more challenging or have simply changed, because you walked around a corner. Best is to move to an open area or keep the UNI-GR1 stable for a short period of time at the same spot, obtain a FIX and return back to the desired location or resume your path.