How do I set-up the UNI-GR1 as Rover while using Network RTK?
Internet access
Make sure your UNI-GR1 has an active internet connection, this is needed in order to receive the correction data from the RTK network. Check out how to connect to a Wi-Fi network here
Rover, Static Rover or Base
When you have the UNI-Connect interface open, go to Profile to start setting up the positioning. First step is selecting between rover and static rover mode, select rover.

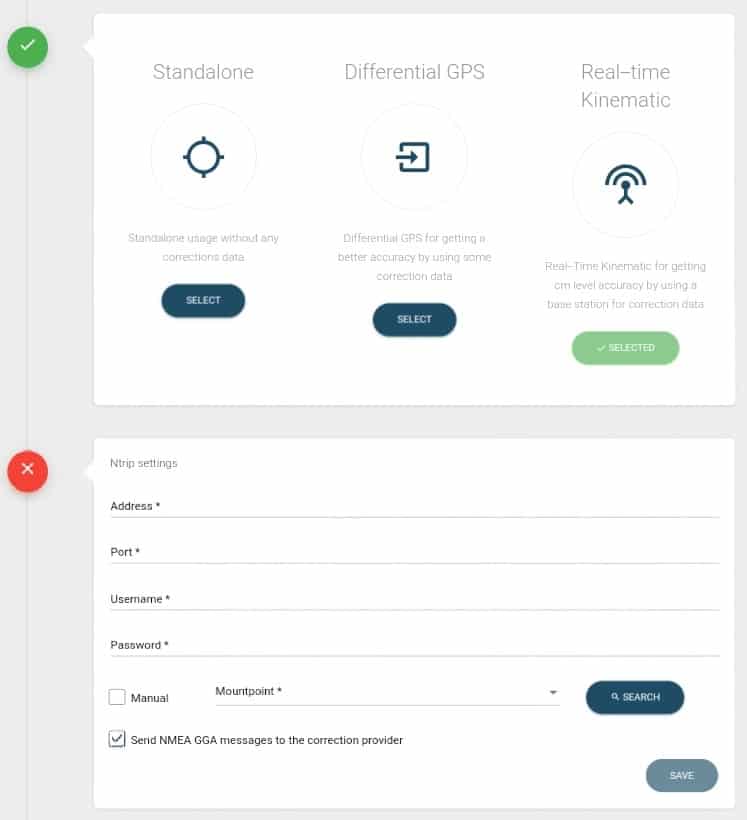
Real-Time Kinematic
When you have selected the Rover mode in the profile and have an active internet connection, you can select Real-Time Kinematic(RTK) in your Profile. When you have selected RTK in your Profile settings, the NTRIP settings will come up. Fill in these settings with your credentials and select the mountpoint. In case you make use of a near-base or VRS solution, select the “Send NMEA messages to the correction provider” box. Now you can press on save and you will get a feedback if you are connected or not.
For more info on how to set this up with UNI-RTK Premium, check the article here. For any other corrections provider, get in touch with the provider for the details.
Once done, you can select your output method, this can be Internal, Bluetooth, Serial or Micro-USB.